Another nice video made by Godlike!
Battlefield V - GIMX, Mouse and Keyboard on PS4!

GIMX adapts your gaming devices!
Another nice video made by Godlike!
This release brings a few enhancements, mostly to the config editors.
More info on the forum: link.
This release brings a few enhancements.
More info on the forum: link.
This release fixes a couple of bugs.
More info on the forum: link.
This release fixes a few issues with gamepads, as well as issues with the Dualshock 3 emulation firmware.
More info on the forum: link.
This release fixes a few issues.
More info on the forum: link.
GIMX has a lot of use cases, which made the documentation become complex. Lots of sections were specific to specific use cases. It became hard to understand. Many people came to the forum requesting a tutorial focusing on their use case. Until now there wasn’t any such thing.
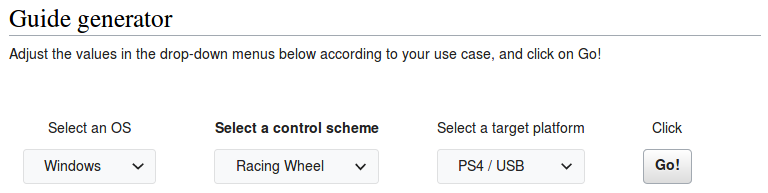
Together with GoDlike we worked on improving the wiki experience. The main page was refreshed and simplified. It now has a guide generator. The use case is selected using three drop-down menus: OS / control scheme / target platform (screenshot below).
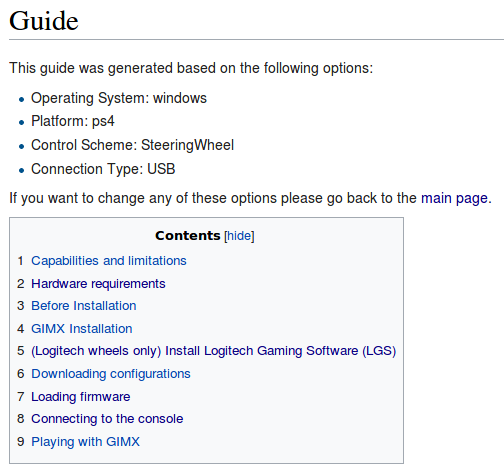
Clicking on OK redirects to a page that matches the use case. All instructions on this page are applicable for the use case. The selected values are resumed at the top of the page, as shown in the screenshot below.
GoDlike also made really nice connection diagrams that will hopefully help people understand the use cases very quickly. Below is the generic diagram that resumes the GIMX capabilities.
